MPU-6050-тай гүйцэтгэлийг оновчтой болгох: Тохируулга, тохируулга, хэрэглээ, програмууд
2024-04-25
9213
Mpu-6050 Дэлхийн анхны нэгдсэн 6 тэнхлэгийн хөдөлгөөний боловсруулалтын бүрэлдэхүүн хэсэг нь 3-тэнхлэгийн хөдөлгөөний боловсруулалт, 3-тэнхлэгийн хөдөлгүүр, 3-тэнхлэгийн хурдатгал, масштабын дижитал хөдөлгөөн (DMP).Үүнийг ашиглах зорилго нь x, y, z x x тэнхлэгийн өнцөг, тэнцвэржүүлэх, өнцгөөр хэмжигдэхүүн, өнцгөөр өнхрөх, өнхрөх өнцгийг хэмжих явдал юм.Бид MPU-6050-ийн зургаан өгөгдлийг уншсан (гурван тэнхлэгийн хурдатгалын үнэ, гурван тэнхлэгийн VALLICE VAINT VELION NAME үнэ.Хууль бус хайлуулах боловсруулалт хийсний дараа давирхай, өнхрөх, өнхрөх, ёроолыг тооцоолох боломжтой.Хэмжилтийн утгыг чиглүүлсэн тохиргооны тодорхойлолтын тодорхойлолтын тодорхойлолт нь доорх гарын мөрдөн байцаагчийн тодорхойлолтыг доор харуулав.Тэнхлэг, долоо тэнхлэгийн эерэг чиглэлд y-тэнхлэгийн эерэг чиглэлийг y-тэнхлэгийн эерэг чиглэлд зааж байна.
Каталог

I2c мэдрэгчтэй автобус, MPU-6050 нь MPU-6050 нь бүрэн гүйцэд 3 тэнхлэгтэй Compire ™ гаралтыг гаргаж авах боломжтой.Энэ нь хосолсон гироскоп ба хурдасгагчийн хоорондын зөрүү, хурдасгуурын цаг хоорондын хоорондох зөрүүг арилгаж, олон бүрэлдэхүүн хэсгийн шийдэлтэй харьцуулахад баглаа боодлын орон зайг багасгадаг.Гурван тэнхлэгийн соронзетртэй холбогдсон тохиолдолд MPU-60x0 нь I2C эсвэл SPI PORT-ийг үндсэн I2C эсвэл SPI-ийн портоор хангах боломжтой.
Аливаа хувилбарууд ба эквивалентууд
Өмнөөс AIS328DDQTR
Өмнөөс ICM-20689
Өмнөөс Mpu-3300
Өмнөөс Mpu-6000
Өмнөөс Mpu-6500
MPU-6050 үйлдвэрлэгч
MPU-6050 үйлдвэрлэгч нь TDK юм.TDK, DRK-ийн хоёр үүсгэн байгуулсны дараа Токиогийн Като, Бокиогийн болон GAPYO BEAKION, SPOKYO DENKIKACKU KOGYOO KOGYO KOGYO K.K-ийг байгуулсан.1935 онд. Глобал электроникийн салбарын брэндийн хувьд TDK нь цахим түүхий эд, цахим эд ангиудын талбайд давамгайлсан байр сууриа үргэлж хадгалдаг.TDK-ийн иж бүрэн ба шинэл хэрэглэдэг бүтээгдэхүүн багц портфефольо нь керамик баримтууд, кондонзон, соронзон чуулгыг нь идэвхгүйжүүлэн, соронзон эдлэл,Соронзон, мементын мэдрэгч) гэх мэт), etc. ext.Бүтээгдэхүүний брэндүүд нь TDK, EPCOS, EPCOS, EPCOSE, EPCOSESE, MicroseS, TELONAS, TDK-LAMBDA орно.
MPU-6050-ийн дотоод блок диаграм
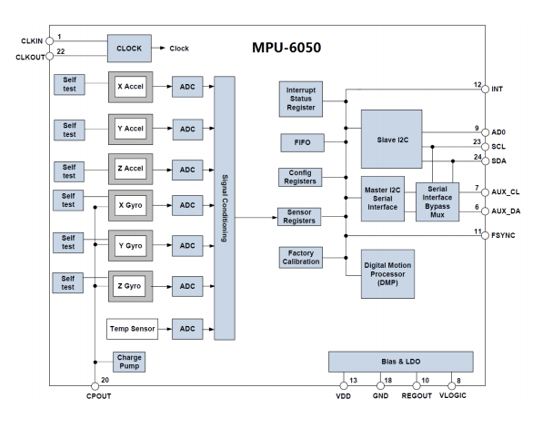
Тэдгээрийн дунд, SCL, SDA нь MCU-т холбогдсон IIC-ийн IIC-ийн интерфейс бөгөөд MPU-6050 нь MPU-6050-ыг энэ IIC интерфэйсээр удирддаг.Мөн IIC интерфэйс, namely Aux_cl ба AUX_DA.Энэ интерфейс нь ердийн боолын төхөөрөмжийг соронзон, есөн тэнхлэг мэдрэгч үүсгэдэг.VLOGIC бол IO POCTOCT хүчдэл юм.Энэ зүү нь дор хаяж 1.8V-ийг дэмжих боломжтой.Бид ихэвчлэн үүнийг vdd руу холбодог.AD0 бол боол IIC интерфэйсийн хаягийн PIN код юм.Энэ PIN нь хамгийн бага нь IIC хаягийг хянадаг.Хэрэв энэ нь gnd-тай холбогдсон бол MPU-6050-ийн IIC-ийн IIC хаяг нь 0x68 юм;Хэрэв энэ нь VDD-тай холбогдсон бол энэ нь 0x69 юм.Хаяг нь хамгийн бага дата дамжуулалтыг багтаахгүй байх нь (хамгийн бага битийг унших, бичих, бичих үйл ажиллагааг илэрхийлэхэд ашигладаг).MWBALESSTSTC15, AD0 дээр AD0 дээр холбогдсон тул MPU-6050-ийн IIC-ийн IIC хаяг нь 0x68-тэй байна.
IIC интерфейсийг эхлүүлэх
MPU-6050 нь STC15-тэй харилцахад IIC-ийг ашигладаг тул SDA-6050-ийг эхлээд mpu-6050-тай холбож өгөх хэрэгтэй.
Mpu-6050 дахин тохируулах
Энэ алхам нь MPU-6050-д бүх бүртгэлийг сэргээдэг бөгөөд Power Manager Record 1-ээс 1-ийг бичсэн тохиолдолдДахин тохируулсны дараа цахилгаан эрчим хүчний бүртгэл 1-ийг анхдагч утга (0x40), энэ бүртгэлийг MPU-6050-д сэргээж, энэ бүртгэлийг MPU-6050-г сэргээж, хэвийн ажиллаж байх ёстой.
Өнцгийн хурдны мэдрэгчийн бүрэн хэмжээгээр бүрдүүлэх (GYRO) ба хурдатгалын мэдрэгчийг тохируулна уу
Энэ алхамд бид Gyroscope тохиргооны бүртгэлээр дамжуулан хоёр мэдрэгчтэй (FSR) -ийг (0x1b), хурдатгалын мэдрэгчийн тохируулга (0x1c) -ийг тус тусад нь тохируулсан.Ихэвчлэн бид Gyroscope-ийн бүрэн хэмжээний хүрээг ± 2000dps, ± 2G-ийн бүрэн хэмжээгээр нэмэгдүүлдэг.
Бусад параметрүүдийг тохируулна уу
Энд бид дараах параметрүүдийг тохируулах хэрэгтэй: тасалдлыг унтрааж, AUX I2C интерфейсийг идэвхгүй болгох, дижитал багатай, дижитал багатай шүүлтүүрийг тохируулах, дижитал багатай Support-ийг тохируулах, тохируулах, тохируулах.Бид энэ бүлэгт өгөгдөл уншихад саад болохгүй тул тасалдлын функцийг унтраах хэрэгтэй.Бид нэгэн зэрэг бусад гадаад мэдрэгчийг холбохын тулд AUX I2C интерфэйсийг ашиглаагүй тул бид энэ интерфейсийг хаах хэрэгтэй.Эдгээр функцуудыг тасалдуулах бүртгэлээс (0x38) болон Хэрэглэгчийн хяналтын бүртгэл (0x6a) -ийг хянах боломжтой.MPU-6050 нь мэдрэгчийн өгөгдлийг хадгалах FIFO-г ашиглаж болно, гэхдээ бид үүнийг энэ бүлэгт ашиглаагүй тул бид энэ бүлэгт ашиглаагүй тул бүгд FIFO сувгийг хаах хэрэгтэй.Үүнийг FIFEO LODE бүртгэлээр хянах боломжтой (0x23).Анхдагч байдлаар, энэ бүртгэлийн утга 0 байна (энэ нь, FIFO-г идэвхгүй болгосон) тул бид анхдагч утгыг шууд ашиглаж болно.Гироскопын дээж авах хувь нь түүврийн ханшийг хуваах ханшийн бүртгэлээр удирддаг.Ер нь бид энэ дээж авах ханшийг 50 болгож тохируулна. Дижитал багатай Pass Surection (DLPF) тохиргооны бүртгэлийг (0x1a) -ээр дамжуулж байна.Ерөнхийдөө ярих, бид DLPF-ийг өгөгдлийн нарийвчлал, хариу урвалыг тэнцвэржүүлэхийн тулд DLPF-ийг хагасыг нь тогтоох болно.
Системийн цаг эх үүсвэрийг тохируулж, өнцгийн хурд мэдрэгч мэдрэгч, хурдатгалыг идэвхжүүлнэ
Системийн цагийн эх сурвалжийг тохируулах нь цахилгаан эрчим хүчний бүртгэлээс хамаарна.Анхдагч байдлаар эдгээр гурван битийг 0-д тохируулсан бөгөөд энэ нь систем нь 8MHZ RC OSCILLOL-ийг цагны эх үүсвэр болгон ашигладаг.Гэсэн хэдий ч цагны нарийвчлалыг сайжруулахын тулд бид үүнийг 1-ийг ихэвчлэн 1-ийг тогтоодог, x тэнхлэг gyroscopcope chater.Үүнээс гадна өнцгийн хурд мэдрэгч, хурдатгалын мэдрэгч, хурдатгалын мэдрэгч нь эхлүүлэхэд бас чухал алхам юм.Хоёулын үйл ажиллагаагаа Huter менежментийн бүртгэл 2 (0x6c6c) -аар ашигладаг.Харгалзах мэдрэгчийг идэвхжүүлэхийн тулд холбогдох битийг 0 болгож тохируулна уу.Дээрх алхамуудыг хийж дууссаны дараа MPU-6050 нь хэвийн ажлын статусаа оруулж болно.Тусгайлан тохируулагдсан бүртгэлүүд нь системийн үндсэн утгыг системээс авах болно.
MPU-6050 ажил хэрхэн ажилладаг вэ?
Гиро мэдрэгч
Мэдрэгч нь гирозкопийн үр нөлөөс шалтгаалан нэг зэрэгцээ байр сууриа эзэлдэг.Тиймээс бид анхны чиглэлаас гетрийн хазаагыг судалснаас новш, өнцмэгийн үнэлгээг тооцож болно.
Хурдасгуур үүсгэгч мэдрэгч
Хурдасгерометр мэдрэгч нь хурдатгалыг хэмжих төхөөрөмж юм.Хурдатгалын үеэр мэдрэгч, мэдрэгч нь массын блоконд хэрэглэгдэж, дараа нь Newton-ийн хоёр дахь хуулийг ашиглан хурдатгалын утгыг тооцоолох болно.
Дижитал хөдөлгөөний процессор (DMP)
DMP нь Gyroscope болон accoScope Suglores-ийн өгөгдөл, accosermoxent-ийн өгөгдлийг олж авах, accosermoper-ийн өгөгдлийг олж авах, гаралтын хомсдолыг боловсруулж өгнө.Энэ функц нь захын микропроцорын ажлын ачааллыг маш ихээр бууруулж, төвөгтэй шүүлтүүр, мэдээллийн фупинг хийхээс зайлсхийдэг.
Тэмдэглэл:
Хослох: Хонгорууд нь энгийн супер супер upercomplplpleps юм.Нарийн төвөгтэй тоо нь бодит тоонуудаас бүрдсэн бөгөөд i ^ 2 = -1.
Mpu-6050 хаана ашигласан бэ?
- тоглоом
- Гар утас ба зөөврийн тоглоом
- Хөдөлгөөнт суурилсан тоглоомын хянагч
- Blurfree ™ технологи (видео / одоо ч гэсэн зургийн тогтворжуулалт)
- Airsign ™ Технологи (Аюулгүй байдал / гэрчлэлтийн хувьд)
- Шуурхай ™ ™ ™ ™ ™ ™ зан авирыг хүлээн зөвшөөрөх
- Эрүүл мэнд, фитнес, спорт, спортод зориулсан элэгдэл
- Хөдөлгөөнтэй тоглоомын компьютер ба програмын хүрээнд
- MotionCommmand ™ технологи (дохио зангаа богиносгосон)
- Байршилд суурилсан үйлчилгээ, сонирхлын цэгүүд, үхсэн цэгүүд
- Интернет холбосон DTV-ийн 3D алсын удирдлага, дээд хайрцаг, 3D хулганыг тохируулна уу
- ™ Хаа сайт дээр дарна уу.
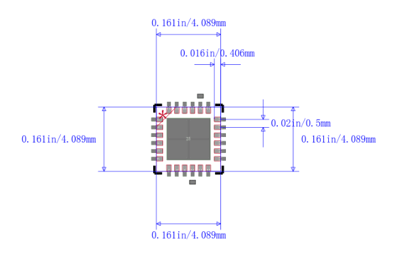
MPU-6050 багц
MPU-6050-ийн дуу чимээг хэрхэн бууруулах вэ?
MPU-6050-ийн дуу чимээг багасгахын тулд дараахь аргыг авч болно.
Тохируулгын мэдрэгчийг ашиглах
MPU-6050-ийн хурдасгуур, Gyroscope-ийг тохируулах нь бие даасан байдал, мэдрэмжийн алдааг арилгах боломжтой тул дуу чимээний үр нөлөөг арилгаж чаддаг.Шалгалтын явц нь ихэвчлэн хоёр үе шаттай байдаг: статик тохируулга, хөдөлгөөнийг тохируулах.
Техник хангамж шүүлтүүрийн үйл явц
MPU-6050-ийн цахилгаан шугам руу шүүлтүүр авах.Үүний зэрэгцээ PCB-ийн байрлалын үеэр бид өндөр давтамжтай дохионы шугам, өндөр цахилгаан шугам,
Програм хангамж имифкаторын боловсруулах
MPU-6050-аас түүхий өгөгдлийг цуглуулсны дараа бид дуу чимээ гаргахад хүргэдэг.Нийтлэг хэрэглэдэг програм хангамжийн шүүлтүүр шүүлтүүрийн аргууд нь шүүлтүүр, медиан шүүлтүүр, калан шүүлтүүр, kalman шүүлтүүрийг агуулдаг.
Дотоод бага дамжуулалтыг ашиглана уу
MPU-6050 нь хамгийн өндөрт тоон аргыг багасгаж, тэдгээрийг тасралтгүй давтамжийг бууруулахад ашиглаж болох дотоод нэгтгэсэн.Тодруулбал бид MPU-6050-ийн тоон шүүлтүүрийг арилгахын тулд MPU-6050-ийн Connock давтамжийг тохируулж болно.
Mpu-6050-д суурилсан хөдөлгөөнт траектор тооцоолол
MPU-6050 нь объектын хөдөлгөөн, хандлагыг хэмжихэд ашиглаж болох зургаан тэнхлэгийн хурдасгометр, гироскоп мэдрэгч юм.MPU-6050 дээр суурилсан хөдөлгөөнт траектор тооцоог дараахь алхамуудаар ойлгож болно.
Эхний алхам бол мэдрэгчийн өгөгдлийг унших явдал юм.Бид Expuerometometer, Gyroscope-ийг уншихад тохирох драйвер, номын сангийн функцийг ашиглан MPU-6050 мэдрэгчээс унших хэрэгтэй.Эдгээр өгөгдөл нь ихэвчлэн дижитал форматтай байдаг тул зарим хөрвүүлэлт, тохируулгын ажил нь бие махбодийн нэгж дэх бодит хэмжилтийг өөрчлөх шаардлагатай байдаг.
Хоёр дахь алхам бол хурдатгалыг тооцоолох явдал юм.Нэгдүгээрт, бид Accelererometer-ээс ACCELERERMERMATER-ийг AXIS дахь объектын хурдатгалыг боловсруулах шаардлагатай байна.Дараа нь тэнхлэгт объектын хурд, нүүлгэн шилжүүлэлтийг тооцоолохын тулд бид хурдатгалын өгөгдлийг нэгтгэх хэрэгтэй.Euler-ийн арга, жишээ нь Euler-ийн арга, эсвэл lunger-kutta арга нь нүүлгэн шилжүүлэх тооцооллын нарийвчлалыг баталгаажуулахын тулд ихэвчлэн энэ процедурт хэрэглэгддэг.
Гурав дахь алхам бол өнцгийн хурдыг тооцоолох явдал юм.Gyroscope-ийн өгөгдлийг ашиглан тэнхлэг бүрт объектын өнцгийн хурдыг тооцоолж болно.Дахин хэлэхэд энэ өгөгдлийг тохируулах, бодит биет нэгжийн өнцгийн хурдыг авахын тулд хөрвүүлэх шаардлагатай.
Дөрөв дэх алхам бол эргэлтийг тооцоолох явдал юм.Өнцгийн хурдны өгөгдлийг нэгтгэх замаар тэнхлэг дэх объектын өнцгийг тооцоолох боломжтой.Үүнийг Euler-ийн ENGERATIASITATION арга эсвэл euler-ийн арга хэрэгсэл ашиглан өнцгийг тооцоолохын тулд тоон хувилбарыг ашиглан хийж болно.
Тав дахь алхам бол өгөгдлийг нэгтгэх явдал юм.Бид Acceerometer болон Gyroscopes-аас өгөгдлийг нэгтгэж, объектын бүрэн хандлага, байр сууриа илэрхийлэхийн тулд өгөгдлийг нэгтгэдэг.Үүнийг quaternion дээр суурилсан хандлагад суурилсан хандлага эсвэл euler өнцөг гэх мэт алгоритмийг ашиглан хийж болно.
Зургаа дахь алхам бол үр дүнг төсөөлөх явдал юм.Тооцоолсон объектын хөдөлгөөнийг 3D координатын систем болгон хувиргаж, объектын хөдөлгөөний хөдөлгөөн, хандлагын өөрчлөлтийг ашиглан дэлгэцэн дээр харуулах.
Байнга асуудаг асуултууд [FAQ]
1. Mpu6050 хэр үнэн бэ?
Хүлээн авсан үр дүн нь лифтний босоо ам, өргөлтийн үйлдвэрлэлийн зохих түвшинг зохих ёсоор, найдвартай, найдвартай байдлыг хангалттай нарийвчлан харуулсан болно.
2. MPU6050-аас өгөгдлийг хэрхэн унших вэ?
Дотоод MPU6050 бүртгэлийг уншихын тулд Мастер эхлэх нөхцөлийг эхлүүлсэн бөгөөд I2C боолын хаяг, дараа нь бичиж, дараа нь унших хаягийг уншиж, дараа нь унших хаягийг илгээдэг.
3. MPU6050 хаана ашигласан бэ?
Эрүүл мэндийн үзлэгт, фитнесс хянах төхөөрөмж.Дрон ба квадльтеруудад MPU6050-ийг байршуулахад ашигладаг.Робот гарыг хянахад ашигладаг.Гар дохио зангаа хянах төхөөрөмж.
4. MPU6050 IMU уу?
MPU6050 IMUE Sensor Block нь MPU-6050 S мэдрэгчийг техник хангамжид холбогдсон байна.Блок нь хурдасгах хурдатгал, өнцгийн хувь, мэдрэгчийн тэнхлэгийн дагуу температур, температур.
5. MPU6050-ийг боловсруулахад юу вэ?
Энэ бол хурдасгуур, гироскопын өгөгдлийг нэгтгэдэг MPU6050-ийн MPU6050-ийн процессор юм.DMP нь MPU6050-ийг ашиглах түлхүүр бөгөөд дараа нь нарийвчлан тайлбарлана.Бүх Микропроцессоруудын адил DMP-ийн хувьд DMP-ийг ажиллуулахын тулд програм хангамж шаарддаг.
Функцийн тест.Хамгийн их зардал үр дүнтэй бүтээгдэхүүн, хамгийн сайн үйлчилгээ бол мөнхийн амлалт юм.
Халуун зүйл
- Нь CR2032 ба CR2016 хооронд сольж болно
- Мосфет: Тодорхойлолт, ажлын зарчим, сонголт
- RELEAL SOLDATIONITATION, ТЕСТЕРИЙН ТӨЛӨВЛӨГӨӨ, ЭРХ ЗҮЙН ТӨЛӨВЛӨГӨӨГИЙН ДЭЛГЭРЭНГҮЙ
- CR2016 vs. CR2032 ба ялгаа нь юу вэ?
- NPN VS. PNP: Ялгаа нь юу вэ?
- ESP32 VS STM32: Та ямар микроконтроллер танд илүү дээр вэ?
- LM358 хос ажилладаг үллал чанарын станц: FINOUTS, PINFOUTSING DIAMINGSION
- CR2032 VS DL2032 VS CR2025 харьцуулах гарын авлага
- ESP32 ба ESP32-S3 техникийн болон гүйцэтгэлийн дүн шинжилгээ
- RCECETETABEDDIDADEDEDEDEDEDEDEDEDEDEDEADEDEDEDEADEDASE дүн шинжилгээ
 NRF24L01 харилцааны чип, програмыг судлах
NRF24L01 харилцааны чип, програмыг судлах
2024-04-25
 MMBT3904 NPN транзист: Түүний үзүүлэлт: түүний үзүүлэлт, өргөн өргөдлийн гарын авлага, өргөн өргөдлийн гарын авлага, болон MMBT399 VS. MMBT551
MMBT3904 NPN транзист: Түүний үзүүлэлт: түүний үзүүлэлт, өргөн өргөдлийн гарын авлага, өргөн өргөдлийн гарын авлага, болон MMBT399 VS. MMBT551
2024-04-25
Халуун хэсгийн дугаар
 CGJ3E2X7R1H333K080AA
CGJ3E2X7R1H333K080AA CGA5L2X5R1H474M160AA
CGA5L2X5R1H474M160AA GRM0225C1E3R4WDAEL
GRM0225C1E3R4WDAEL 08051C273KAT2A
08051C273KAT2A GRM31CR60J476ME19L
GRM31CR60J476ME19L AC1206JRNPOBBN221
AC1206JRNPOBBN221 CC0603JRNPO8BN122
CC0603JRNPO8BN122 08055A5R5CAT2A
08055A5R5CAT2A- 08055A680J4T2A
 06035A910FAT2A
06035A910FAT2A
- 1812GA151KAT1AJ
- 12105C225M4Z2A
- 2220GA222JAT1A
- GCM0335C1E3R6CD03D
- CL31B225MOHNNNE
- 2-1445085-3
- MT9173AN1
- MAX8903JETI+T
- MAX696CWE
- V150A12T500BL
- SST39VF6401B-70-4C-EKE
- DS2761BE-025
- MC68HC908EY16VFA
- RC0603FR-0749K9L
- SKD30/02A1
- AD8000YRDZ
- ADM1031ARQZ-REEL
- M87C257-15C6
- F971D226MNCHT3
- XCF16PFS48C
- VCA8500IRGCT
- T491C226K016ZTPB13Z010
- ADWE7759A
- ATSAM4LS4AA-UES
- BCM5400KTBC5
- DS2720BU/TR
- EP1C20F400C6L
- LC4512V-75TN176-10I
- PMB9933E200X
- S08RN48VLF
- SAF-XC2268M-72F66L
- X1016BASE-3CA2-F
- MRCH215-15JC-18JI
- ADSP-21161NCCA100
- GW17M06REV02
- TSR-3386X-EY5-502R
- QLN-4640-0-41PSP
- VL82C003QCT1
- IS-5415-CG